Deep Residual Learning for Image Recognition
读论文时间!
计算机视觉模型:ResNet
参考:吴恩达深度学习视频
吴恩达说残差网络
非常非常深的神经网络是很难训练的,因为存在梯度消失和梯度爆炸问题。这节课我们学习跳跃连接(Skip connection),它可以从某一层网络层获取激活,然后迅速反馈给另外一层,甚至是神经网络的更深层。利用跳跃连接构建能够训练深度网络的残差网络(ResNet),有时深度能够超过100层。
回忆一下$a^{[l]}$到$a^{[l+2]}$的计算过程:
\[\begin{align} \left\{ \begin{aligned} z^{\left\lbrack l + 1 \right\rbrack} = W^{\left\lbrack l + 1 \right\rbrack}a^{[l]} + b^{\left\lbrack l + 1 \right\rbrack} \\ a^{\left\lbrack l + 1 \right\rbrack} =g(z^{\left\lbrack l + 1 \right\rbrack})\\ z^{\left\lbrack l + 2 \right\rbrack} = W^{\left\lbrack l+2 \right\rbrack}a^{\left\lbrack l + 1 \right\rbrack} + b^{\left\lbrack l + 2 \right\rbrack}\\ a^{\left\lbrack l + 2 \right\rbrack} = g(z^{\left\lbrack l + 2 \right\rbrack}) \end{aligned} \right. \end{align}\]
在残差网络中有一点变化,在$a^{[l]}$到$a^{[l+2]}$的计算过程更改如下:
\[\begin{align} \left\{ \begin{aligned} z^{\left\lbrack l + 1 \right\rbrack} = W^{\left\lbrack l + 1 \right\rbrack}a^{[l]} + b^{\left\lbrack l + 1 \right\rbrack} \\ a^{\left\lbrack l + 1 \right\rbrack} =g(z^{\left\lbrack l + 1 \right\rbrack})\\ z^{\left\lbrack l + 2 \right\rbrack} = W^{\left\lbrack l+2 \right\rbrack}a^{\left\lbrack l + 1 \right\rbrack} + b^{\left\lbrack l + 2 \right\rbrack}\\ \ a^{\left\lbrack l + 2 \right\rbrack} = g\left(z^{\left\lbrack l + 2 \right\rbrack} + a^{[l]}\right) \end{aligned} \right. \end{align}\]把一个普通网络(Plain network)变成ResNet的方法是加上跳跃连接,如同下面这张图,每两层增加一个捷径,构成一个残差块,5个残差块连接在一起构成一个残差网络。
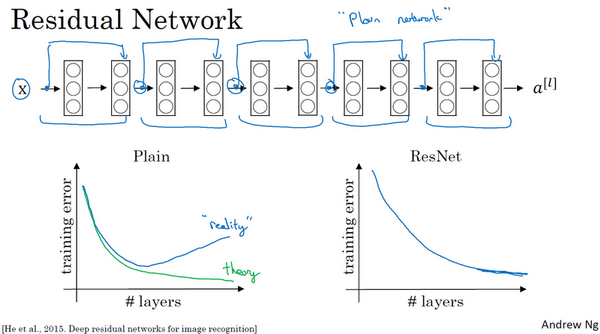
如果我们使用标准优化算法训练一个普通网络,比如说梯度下降法,没有加上残差,凭经验会发现随着网络深度的加深,训练错误会先减少,然后增多。(尽管理论上,随着网络深度的加深,应该训练得越来越好才对)
ResNets确实在训练深度网络方面非常有效,它确实有助于解决梯度消失和梯度爆炸问题,让我们在训练更深网络的同时,又能保证良好的性能。
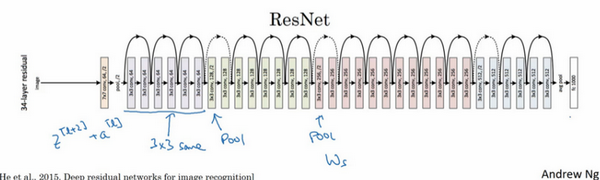
一个图片识别的ResNet例子:
论文省流版
1. Introduction
网络深度十分重要,然而主流的“深层”网络(只)包含16到30层。
如图,一个困境是对于朴素的神经网络,当深度到达一定程度时,更深的网络反而误差更大。原因来自于梯度消失与梯度爆炸。
ResNet希望对于一个更深的网络,其误差要比浅层版本要低。
这是一个基本模块,ResNet由这种基本模块堆叠构成。
在ImageNet数据集上实验后,ResNet的优点包括:
- 容易优化,比朴素网络的误差更低。
- 能够充分享受到深层网络的优势。
2. Related Work
之前的工作告诉我们,良好的重新制定或预处理可以简化优化过程。
相比“highway networks”,ResNet的基本模块是无参的,没有“门”的概念,门也不会关闭,并且能将层数做得更多。
3. Deep Residual Learning
在朴素的网络中,我们假设某几层要学习$\mathcal{H}(\text{x})$。而上图中的ResNet基本模块中,添加了一条“捷径”,那些层本身要学习的变成了:$\mathcal{F}(\text{x}):=\mathcal{H}(\text{x})-\text{x}$
这样,在通过捷径加入$\text{x}$后,又变回了原来的$\mathcal{H}(\text{x})$。
这种操作有效的原因是,基本模块在什么也不做只是传递$\text{x}$时,即$\mathcal{F}(\text{x})=0$,就退化成了层数更少,更简单的网络,理论上误差不会比浅层网络更大。
相比与朴素的网络,ResNet训练$\mathcal{H}(\text{x})=\text{x}$更简单,因为只需要让$\mathcal{F}(\text{x})$的参数$W=0$。
如果用公式总结ResNet基本模块,(并且$\mathcal{F}$与$\text{x}$维度一样)可以这么写:
\[\text{y}=\mathcal{F}(\text{x},\{W_i\})+\text{x} \tag{1}\]在上图示例中使用了两层,所以$\mathcal{F}=W_2\sigma(W_1\text{x})$
如果$\mathcal{F}$与$\text{x}$维度不一致,公式可以修改为:
\[\text{y}=\mathcal{F}(\text{x},\{W_i\})+W_s\text{x} \tag{2}\]作者建议只在使用维度匹配时加入参数$W_2$,因为实验证明不加参数$W_2$性能已经足够。
如上图,分别是VGG-19,朴素网络与残差网络。注意虽然看上去VGG-19更简单,残差网络的参数量是更少的。
残差网络的设计有两个特点:
- 同一个基本模块的过滤器数量相同。
- 特征矩阵每次减半,过滤器数量翻倍。
4. Experiments
对于ImageNet数据集的实验证明RetNet很棒,三个原因:
- 对于RetNet更深的网络,其误差要比浅层版本要低。
- 在深层学习中残差学习很高效。
- 更快收敛。
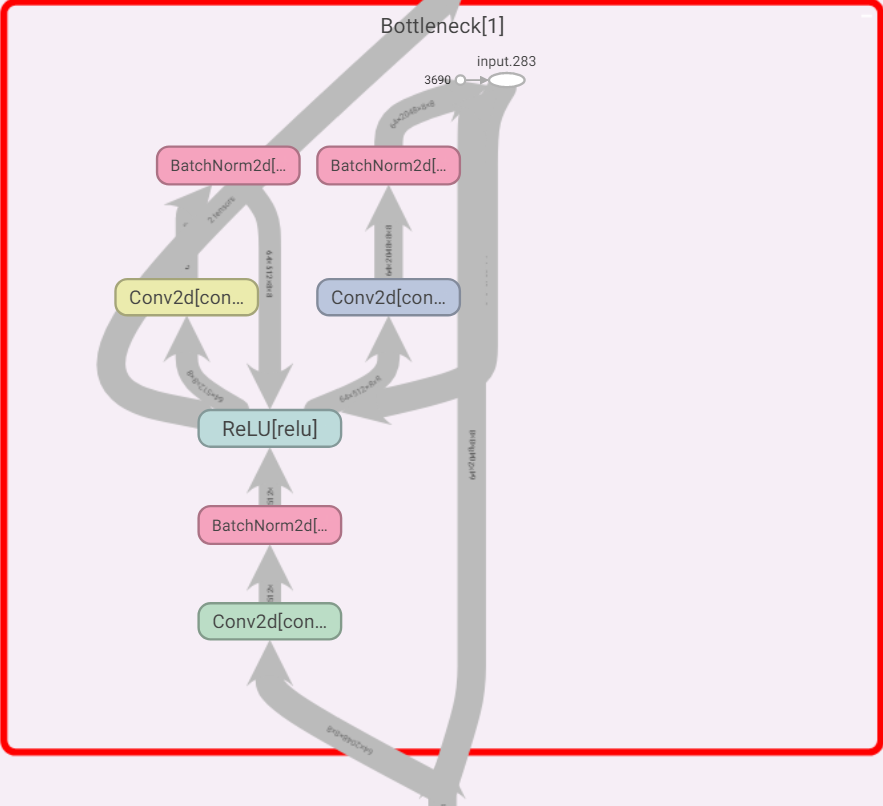
为了训练经济考虑(在有限的计算资源下缩短训练时间),论文作者引入了瓶颈层。如下图右侧,两个1x1的卷积层负责降维和升维,所以留给3x3卷积层计算的数据可以变少。
注意引入瓶颈层会使准确率下降(原因与朴素网络相同),引入的理由只是训练经济考虑。
代码分析
代码来自PyTorch中torchvision的ResNet。
以最简单的ResNet18为例,初始化并且打印网络结构:
1
2
3
4
import torchvision
model = torchvision.models.resnet18()
print(model)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=1000, bias=True)
)
可视化版本:
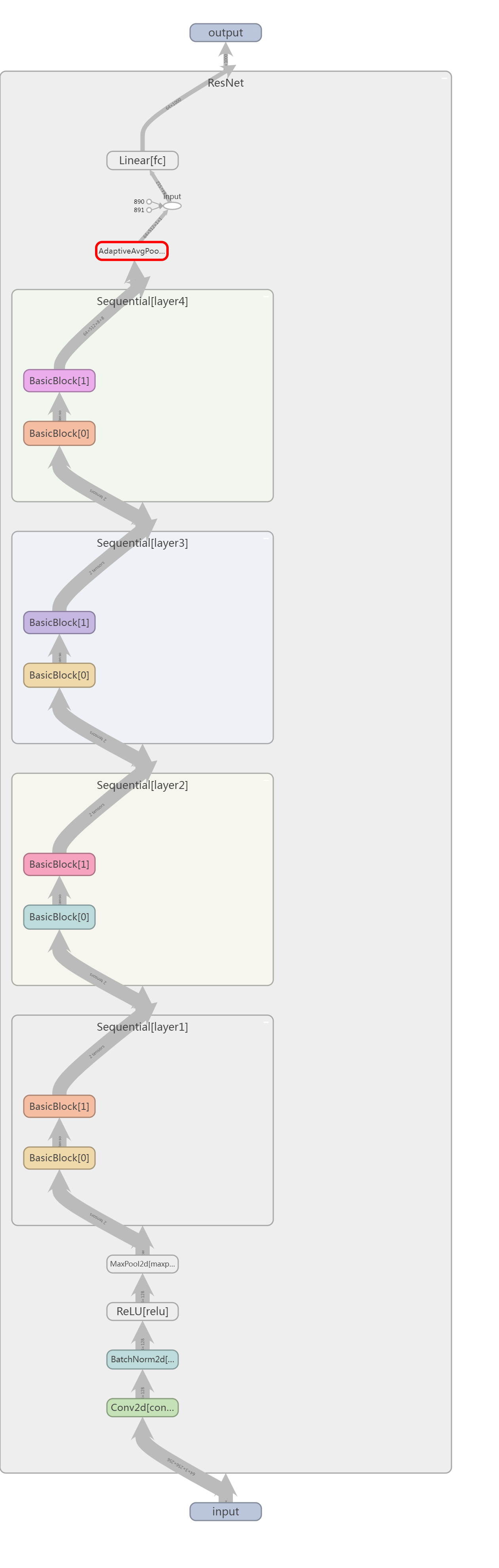
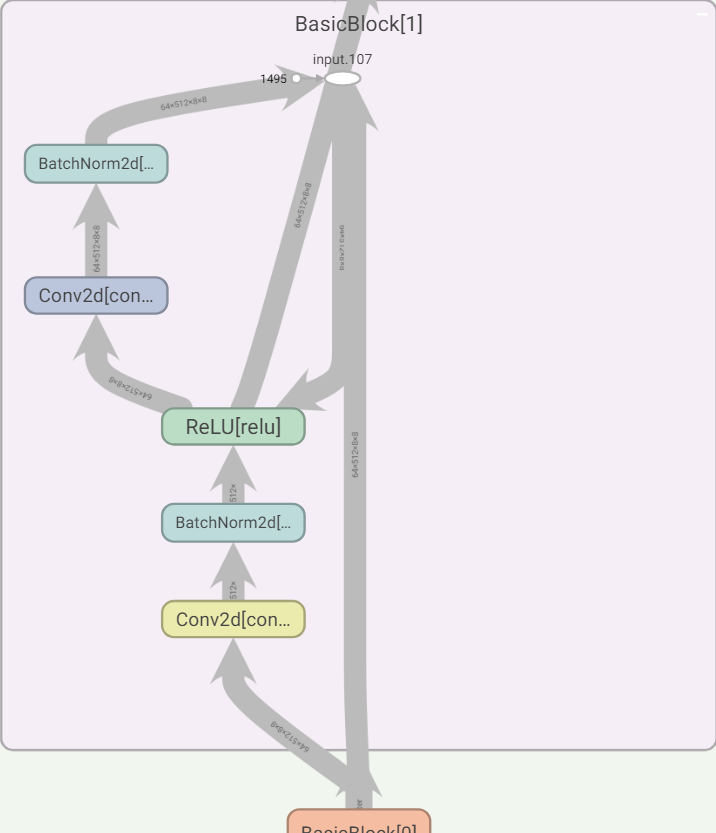
其中,一个基本模块:
现在深入torchvision源码,虽然提供了很多restet版本,比如’resnet18’, ‘resnet34’, ‘resnet50’, ‘resnet101’,’resnet152’等等,它们都由类似的函数生成:
1
2
3
4
5
6
7
8
9
def resnet18(pretrained=False, progress=True, **kwargs):
r"""ResNet-18 model from
`"Deep Residual Learning for Image Recognition" <https://arxiv.org/pdf/1512.03385.pdf>`_
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
progress (bool): If True, displays a progress bar of the download to stderr
"""
return _resnet('resnet18', BasicBlock, [2, 2, 2, 2], pretrained, progress,
**kwargs)
通过观察上面打印的网络结构,都有layer1,layer2,layer3,layer4,它们的结构不同是’resnet18’, ‘resnet34’, ‘resnet50’, ‘resnet101’,’resnet152’各个版本区分的本质,这由参数[2, 2, 2, 2]决定。
BasicBlock是一个类,就是论文中提到的基本模块。
而_resnet是什么呢?
1
2
3
4
5
6
7
def _resnet(arch, block, layers, pretrained, progress, **kwargs):
model = ResNet(block, layers, **kwargs)
if pretrained:
state_dict = load_state_dict_from_url(model_urls[arch],
progress=progress)
model.load_state_dict(state_dict)
return model
其中核心语句model = ResNet(block, layers, **kwargs),block是BasicBlock,layers是参数[2, 2, 2, 2]。
终于到我们的ResNet类了,看看__init__函数,不太重要的语句去除了:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=1000, zero_init_residual=False,
groups=1, width_per_group=64, replace_stride_with_dilation=None,
norm_layer=None):
super(ResNet, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
self._norm_layer = norm_layer
self.inplanes = 64
self.dilation = 1
self.groups = groups
self.base_width = width_per_group
self.conv1 = nn.Conv2d(3, self.inplanes, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2,
dilate=replace_stride_with_dilation[0])
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
dilate=replace_stride_with_dilation[1])
self.layer4 = self._make_layer(block, 512, layers[3], stride=2,
dilate=replace_stride_with_dilation[2])
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
我们可以对照上面打印的网络结构基本理解各层,除了生成layer1,layer2,layer3,layer4的_make_layer函数,来看看,本质上就是添加layers[i]个基本模块:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
def _make_layer(self, block, planes, blocks, stride=1, dilate=False):
norm_layer = self._norm_layer
downsample = None
previous_dilation = self.dilation
if dilate:
self.dilation *= stride
stride = 1
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
conv1x1(self.inplanes, planes * block.expansion, stride),
norm_layer(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample, self.groups,
self.base_width, previous_dilation, norm_layer))
self.inplanes = planes * block.expansion
for _ in range(1, blocks):
layers.append(block(self.inplanes, planes, groups=self.groups,
base_width=self.base_width, dilation=self.dilation,
norm_layer=norm_layer))
return nn.Sequential(*layers)
对于两个残差块之间可能维度不匹配无法直接相加的问题,相同类型的残差块只需要改变第一个输入的维数就好,后面的输入维数都等于输出维数。第一残差块需特判。
基本模块代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
base_width=64, dilation=1, norm_layer=None):
super(BasicBlock, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if groups != 1 or base_width != 64:
raise ValueError('BasicBlock only supports groups=1 and base_width=64')
if dilation > 1:
raise NotImplementedError("Dilation > 1 not supported in BasicBlock")
# Both self.conv1 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = norm_layer(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = norm_layer(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
其中,conv3x3就是3x3的卷积层:
1
2
3
4
def conv3x3(in_planes, out_planes, stride=1, groups=1, dilation=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=dilation, groups=groups, bias=False, dilation=dilation)
norm_layer默认使用nn.BatchNorm2d,即对小批量(mini-batch)3d数据(即通道加2d数据)组成的4d输入(即batch-size,通道加2d数据)进行批标准化(Batch Normalization)操作,在每一个小批量(mini-batch)数据中,计算输入各个维度的均值和标准差。gamma与beta是可学习的大小为C的参数向量(C为输入大小)在训练时,该层计算每次输入的均值与方差,并进行移动平均。移动平均默认的动量值为0.1。
对于 ‘resnet50’, ‘resnet101’,’resnet152’,基本模块就变成了瓶颈层:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
class Bottleneck(nn.Module):
# Bottleneck in torchvision places the stride for downsampling at 3x3 convolution(self.conv2)
# while original implementation places the stride at the first 1x1 convolution(self.conv1)
# according to "Deep residual learning for image recognition"https://arxiv.org/abs/1512.03385.
# This variant is also known as ResNet V1.5 and improves accuracy according to
# https://ngc.nvidia.com/catalog/model-scripts/nvidia:resnet_50_v1_5_for_pytorch.
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
base_width=64, dilation=1, norm_layer=None):
super(Bottleneck, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
width = int(planes * (base_width / 64.)) * groups
# Both self.conv2 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv1x1(inplanes, width)
self.bn1 = norm_layer(width)
self.conv2 = conv3x3(width, width, stride, groups, dilation)
self.bn2 = norm_layer(width)
self.conv3 = conv1x1(width, planes * self.expansion)
self.bn3 = norm_layer(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
1
2
3
4
5
6
7
8
9
(1): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)