来自 HuggingFace 🤗 强化学习课程 与 《大规模语言模型 从理论到实践》
强化学习(Reinforcement Learning,RL)研究的问题是智能体(Agent)与环境(Environment) 交互的问题,其目标是使智能体在复杂且不确定的环境中最大化奖励(Reward)。
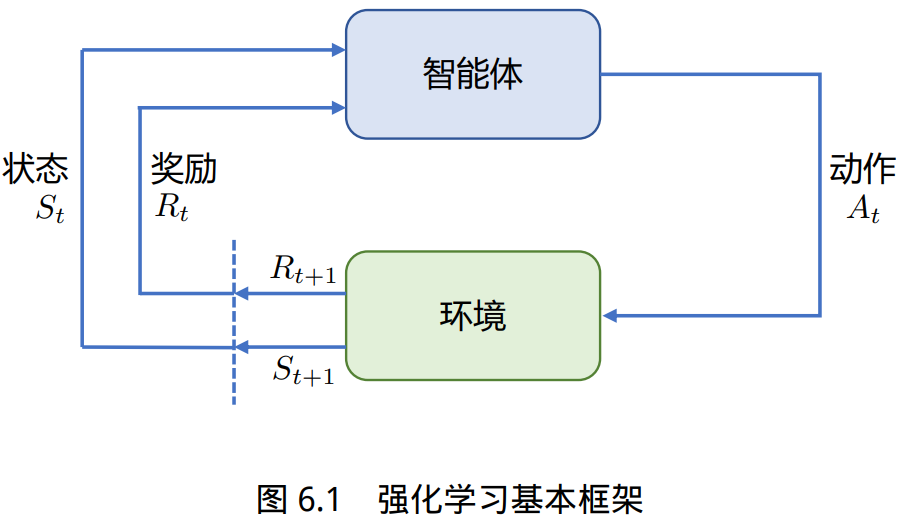
强化学习基本框 架如图所示,主要由两部分组成:智能体和环境。在强化学习过程中,智能体与环境不断交互。 智能体在环境中获取某个状态后,会根据该状态输出一个动作(Action),也称为决策(Decision)。 动作会在环境中执行,环境会根据智能体采取的动作,给出下一个状态以及当前动作所带来的奖 励。智能体的目标就是尽可能多地从环境中获取奖励。
定义与概念
通过机器狗学习抓飞盘的例子,可以引出一些强化学习中基本概念:
- 智能体与环境:在机器狗学习抓飞盘的场景中,机器人狗就是一个智能体(Agent),它做出 决策并执行动作。而它所在的场景,包括飞盘的飞行轨迹和速度,以及其他可能的因素,则 构成了环境(Environment)。环境会根据智能体的行为给予反馈,通常以奖励的形式。
- 状态、行为与奖励:每次机器狗尝试抓飞盘,它都在评估当前的状态(State),这可能包括 飞盘的位置、速度等。基于这些信息,它会采取某种动作(Action),如跳跃、奔跑或待在原 地。根据机器狗所执行的动作,环境随后会给出一个奖励(Reward),这可以是正面的(成 功抓住飞盘)或负面的(错过了飞盘)。
- 策略与价值: 机器狗在尝试各种行为的过程中,其实是在学习一个策略(Policy)。策略可以 视为一套指导其如何在特定状态下行动的规则。与此同时,智能体还试图估计价值(Value) 函数,也就是预测在未来采取某一行为所能带来的奖励。
智能体与环境的不断交互过程中,会获得很多观测 oi。针对每一个观测,智能体会采取一个 动作 ai,也会得到一个奖励 ri。可以定义历史 Ht 是观测、动作、奖励的序列:
\[H_t=o_1,a_1,r_1, \cdots , o_t,a_t,r_t\]观察和状态
观察和状态之间需要区分:
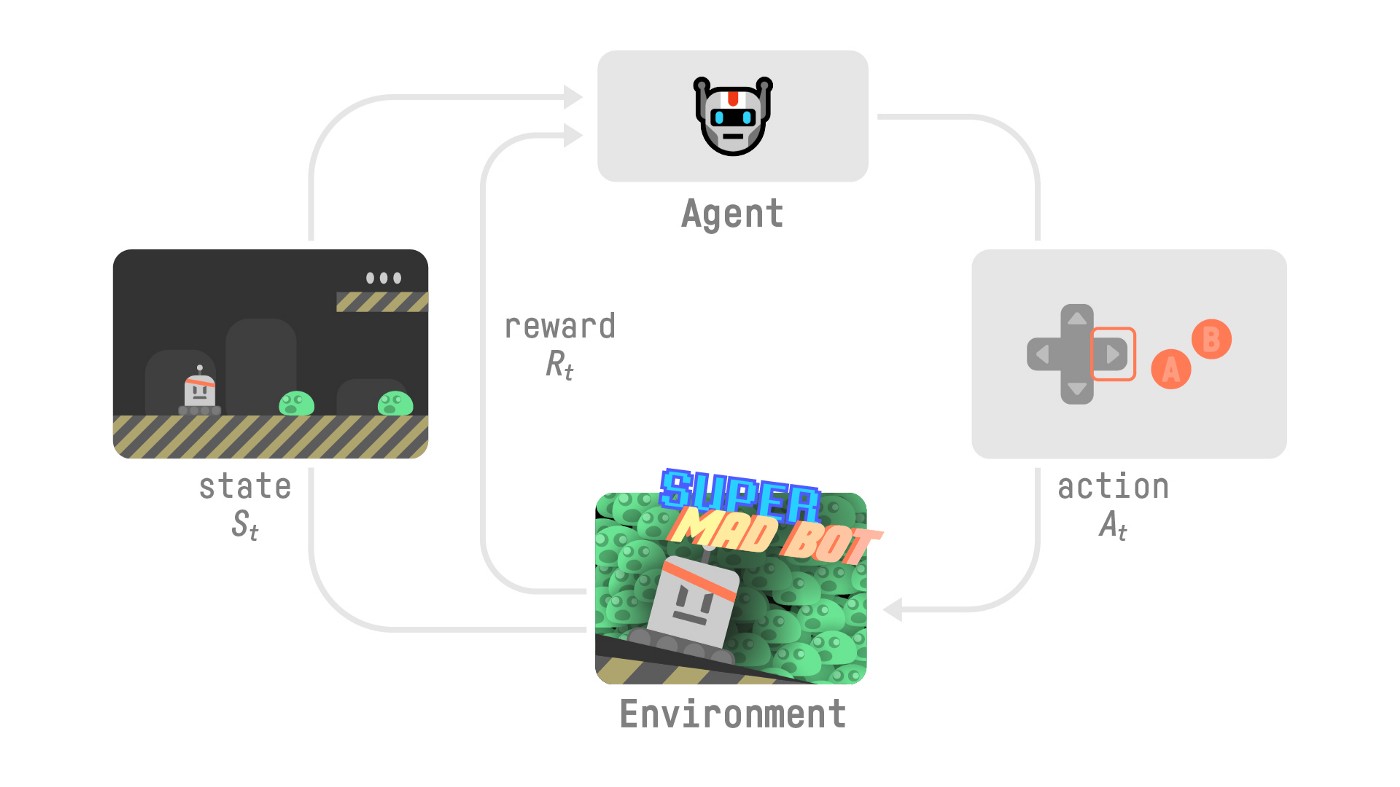
- 状态 s:是对世界状态的完整描述(没有隐藏信息)。在充分观察的环境中。在国际象棋游戏中,我们可以访问整个棋盘信息,因此我们从环境中接收状态。换句话说,环境是完全观察的。
- 观察 o:是对状态的部分描述。 在部分观察到的环境中。在《超级马里奥兄弟》中,我们只能看到关卡中靠近玩家的部分,因此我们收到了观察结果。

智能体在采取当前动作的时候会依赖于它之前得到的历史,因此可以把环境整体状态 St 看做关于 历史的函数:
\[S_t=f(H_t)\]智能体能够观察到环境的所有状态时,称环境是完全可观测的(Fully Observed),这时观测 ot 等 于 St。当智能体只能看到部分的观测,称这个环境是部分可观测的(Partially Observed),这时观 测对状态的部分描述。整个的状态空间使用 S 进行表示。
动作空间
在给定的环境中,有效动作的集合经常被称为动作空间(Action Space),使用 A 进行表示:
- 围棋(Go)这样的环境具有离散动作空间(Discrete Action Space),智能体的动作数量在这个空 间中是有限的。智能体在围棋中的动作空间只有 361 个交叉点。
- 物理世界中则通常是连续动作 空间(Continuous Action Space)。在连续动作空间中,动作通常是实值的向量。例如,在平面中, 机器人可以向任意角度进行移动。
策略
策略是智能体的动作模型,决定了智能体的动作。策略也可以用函数进行表示,该函数将输入 的状态变成动作。策略可分为两种:随机性策略和确定性策。
- 随机性策略(Stochastic Policy)用 π 函数表示,即 \(π(a|s) = p(a_t = a|s_t = s)\) ,输入一个状态 s,输出一个概率,表示智能体所有动作的 概率。利用这个概率分布进行采样,就可以得到智能体将采取的动作。
- 确定性策略(Deterministic Policy)是智能体直接采取最有可能的动作,即 \(a^∗ = \mathop{\arg \max}\limits_{a} π(a|s)\)
价值函数的理解
价值函数的值是对未来奖励的预测,可以用它来评估状态的好坏。价值函数可以只根据当前的 状态 s 决定,使用 $V_π(s)$ 表示。也可以根据当前状态 s 以及动作 a 表示,使用 $Q_π(s, a)$ 表示。
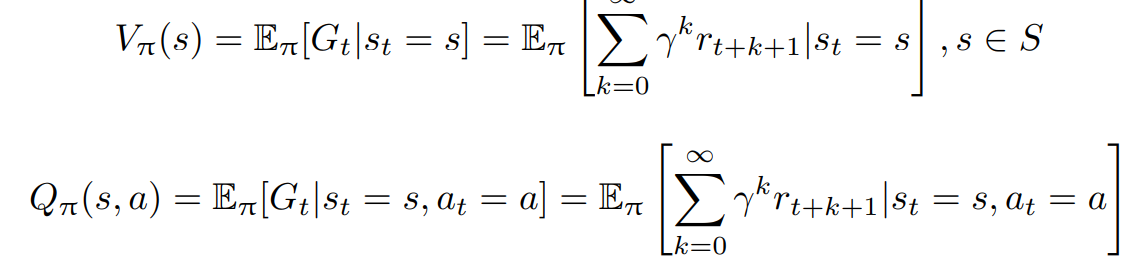
其中,γ 为折扣因子(Discount Factor),针对短期奖励和远期奖励进行折中;期望 E 的下标为 π 函数,其值反映在使用策略 π 时所能获得的奖励值。
可以这么理解:每个时间步长t的累计奖励等于序列中所有奖励的总和:
\[R(\tau)=\sum_{k=1}^{\infty} r_{t+k+1}\]但是,在现实中,我们不能像那样添加它们。 较早到来的奖励(在游戏开始时)更有可能发生,因为它们比长期的未来奖励更具可预测性。
为了打折奖励,我们定义了一个称为 $\gamma$ 的贴现率。 它必须介于 0 和 1 之间。 大多数时候在 0.95 到 0.99 之间。伽玛越大,折扣越小。这意味着我们的代理商更关心长期回报。
\[R(\tau)=\sum_{k=1}^{\infty} \gamma^k r_{t+k+1}\]智能体归类
根据智能体所学习的组件的不同,可以把智能体归类为:基于价值的智能体、基于策略的智 能体和演员-评论员智能体。
- 基于价值的智能体(Value-based Agent)显式地学习价值函数,隐式地 学习策略。其策略是从所学到的价值函数推算得到的。
- 基于策略的智能体(Policy-based Agent)则 是直接学习策略函数。策略函数的输入为一个状态,输出为对应动作的概率。基于策略的智能体 并不学习价值函数,价值函数隐式的表达在策略函数中。
- 演员-评论员智能体(Actor-critic Agent)则 是把基于价值的智能体和基于策略的智能体结合起来,既学习策略函数又学习价值函数都,通过 两者的交互得到最佳的动作。
任务类型
偶发任务:有一个起点和一个终点(一个终端状态)。这将创建一个情节:状态、行动、奖励和新状态的列表。例如,想想《超级马里奥兄弟》:一集从新的马里奥关卡开始,到你被杀或到达关卡结束时结束。
持续任务:永远持续(无最终状态)的任务。在这种情况下,代理必须学习如何选择最佳操作并同时与环境交互。例如,进行自动股票交易的代理。对于此任务,没有起点和最终状态。代理将一直运行,直到我们决定停止它。
探索-利用权衡
探索-利用权衡(exploration-exploitation trade-off)
- 探索是通过尝试随机操作来探索环境,以找到有关环境的更多信息。
- 利用是利用已知信息来最大化回报。
RL智能体的目标是最大化预期的累积奖励。然而,可能会陷入一个常见的陷阱:在游戏中,我们的老鼠可以拥有无限数量的小奶酪(每个+1)。但是在迷宫的顶部,有一大块奶酪(+1000)。
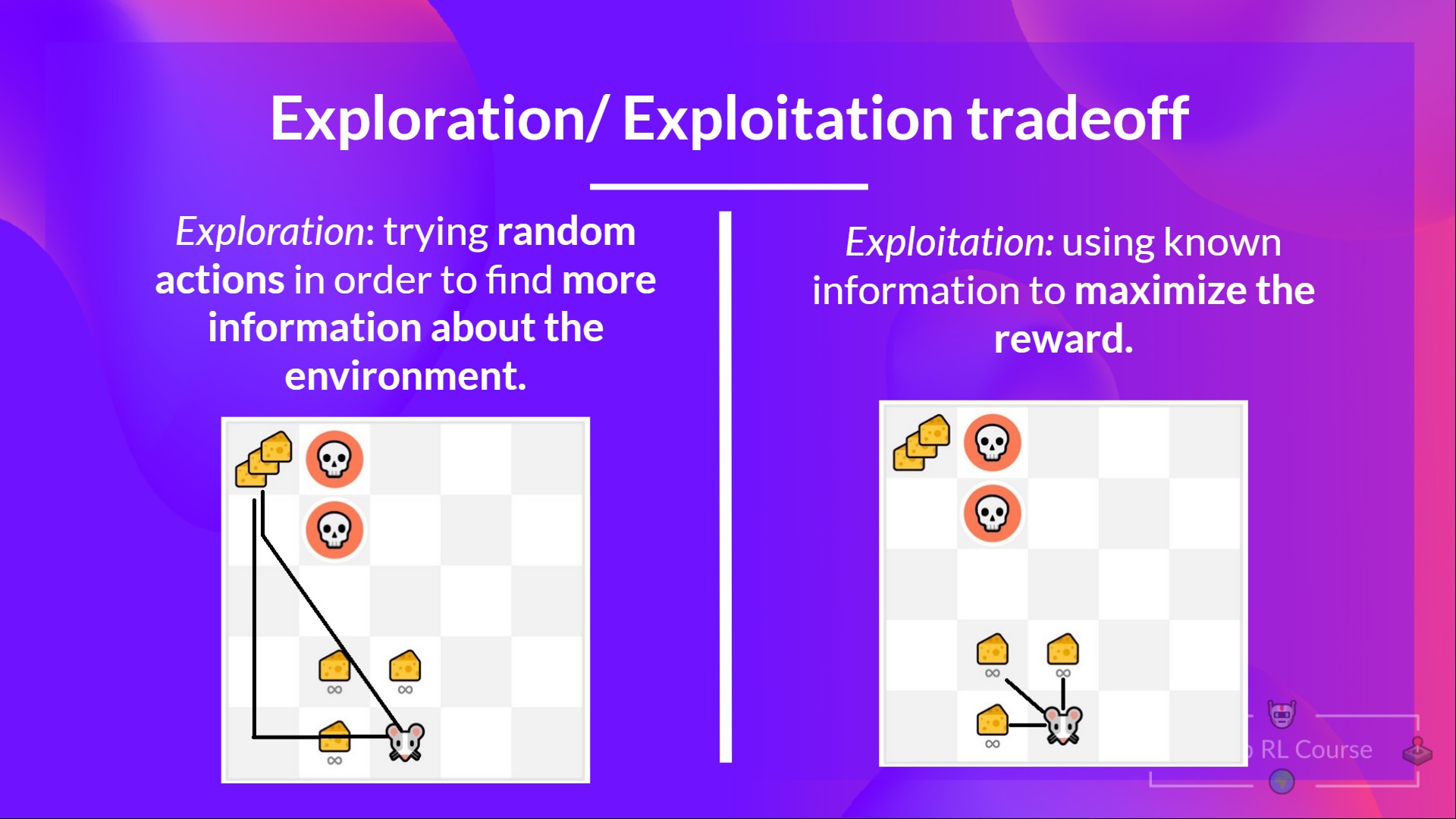
如果我们只专注于剥削,我们的智能体将永远无法达到巨大的奶酪金额。相反,它只会利用最近的奖励来源,即使这个来源很小(利用)。但是,如果我们的代理做一点探索,它就可以发现巨大的奖励(一堆大奶酪)。
因此,我们需要平衡我们对环境的探索程度和我们对环境的了解。我们必须定义一个有助于处理这种权衡的规则。
强化学习与有监督学习的区别
可以用旅行方式进行更直观的对比,有 监督学习和强化学习可以看做两种不同旅行方式。
旅行前的准备:数据来源
- 监督学习: 这如同旅行者们拿着一本旅行指南书,其中明确标注了各个景点、餐厅和交通方 式。在这里,数据来源就好比这本书,提供了清晰的问题和答案对。
- 强化学习: 旅行者们进入了一个陌生的城市,手上没有地图,没有指南。所知道的只是他们 的初衷,比如找到城市中的一家餐厅或博物馆。这座未知的城市,正是强化学习中的数据来 源,充满了探索的机会。
路途中的指引:反馈机制
- 监督学习: 在这座城市里,每当旅行者们迷路或犹豫时,都会有人告诉他们是否走对了路。这 就好比每次旅行者提供一个答案,监督学习都会告诉他们是否正确。
- 强化学习: 但在另一座城市,没有人会直接告诉旅行者们如何走。只会告诉他们结果是好还 是坏。比如,走进了一家餐厅,吃完后才知道这家餐厅是否合适。需要通过多次尝试,逐渐 学习和调整策略。
旅行的终点:目的地
- 监督学习: 在这座城市的旅行目的非常明确:掌握所有的答案,就像参观完旅行指南上提及 的所有景点。
- 强化学习: 在未知的城市,目标是学习如何在其中有效地行动,寻找最佳的路径,无论是寻 找食物、住宿还是娱乐。
深度强化学习
深度强化学习引入了深度神经网络来解决强化学习问题,因此得名“深度”。
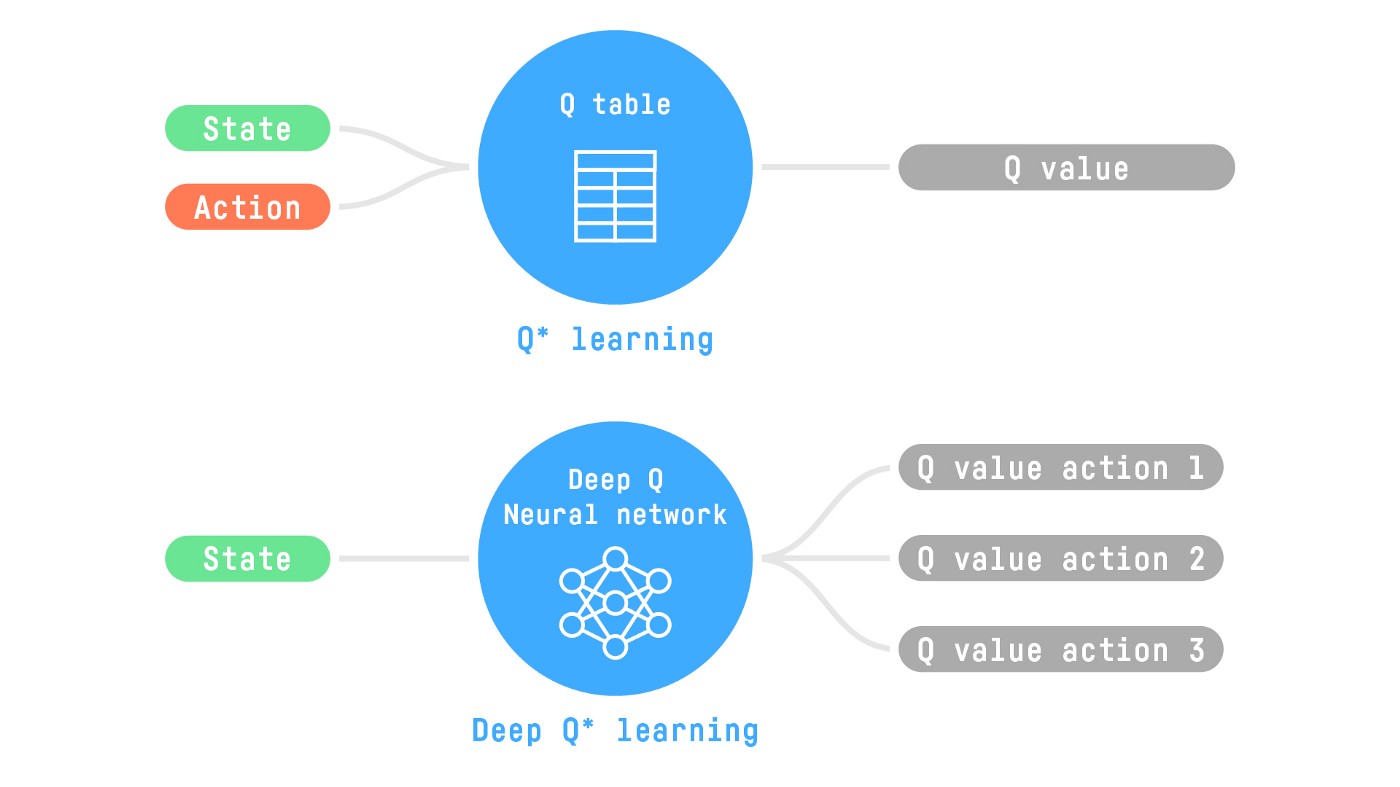
- Q-Learning(经典强化学习):使用传统算法来创建一个 Q 表,帮助我们找到对每个状态要采取的操作。
- 深度 Q-Learning:使用神经网络近似 Q 值。
强化学习与LLM
OpenAI 所做的报告《Reinforcement Learning from Human Feedback: Progress and Challenges》分享了强化学习在大语 言模型上的重要作用,可以概括为以下几个方面。
强化学习比有监督学习更可以考虑整体影响:有监督学习针对单个词元进行反馈,其目 标是要求模型针对给定的输入给出的确切答案。而强化学习是针对整个输出文本进行反馈,并不 针对特定的词元。这种反馈粒度的不同,使得强化学习更适合大语言模型,既可以兼顾表达多样 性,还可以增强对微小变化的敏感性。
自然语言十分灵活,可以用多种不同的方式表达相同的语 义。而有监督学习很难支持上述学习方式。强化学习则可以允许模型给出不同的多样性表达。
有监督微调通常采用交叉熵损失做为损失函数,由于总和规则,造成这种损失对个别 词元变化不敏感,如果改变个别的词元,只会对整体损失产生小的影响。但是,一个否定词可以 完全改变文本的整体含义。强化学习则可以通过奖励函数达到同时兼顾多样性和微小变化敏感性 两个方面。
强化学习更容易解决幻觉问题:用户在大语言模型时主要有三类输入:
- 文本型(TextGrounded):用户输入相关文本和问题,让模型基于所提供的文本生成答案(例如,“本文中提到 的人名和地名有哪些”);
- 求知型(Knowledge-Seeking):用户仅提出问题,模型根据内在知识提供真实回答(例如,“流感的常见原因是什么”);
- 创造型(Creative):用户为提供问题或 说明,让模型进行创造性输出(例如,“写一个关于… 的故事”)。
有监督学习算法非常容易使得求 知型查询产生幻觉。在模型并不包含或者知道答案的情况下,有监督训练仍然会促使模型给出答案。而使用强化学习方法,则可以通过定制奖励函数,将正确答案赋予非常高的分数,放弃回答 的答案赋予中低分数,不正确的答案赋予非常高的负分,使得模型学会依赖内部知识选择放弃回 答,从而在一定程度上缓解模型幻觉问题。
强化学习可以更好的解决多轮对话奖励累积问题:多轮对话能力是大语言模型重要的基 础能力之一,多轮对话是否达成最终目标,需要考虑多次交互过程的整体情况,因此很难使用有 监督学习方法构建。而使用强化学习方法,可以通过构建奖励函数,将当前输出考虑整个对话的 背景和连贯性。